
Understanding drone motor and propeller direction, along with design show us how a quadcopter works.
Quadcopters today, are very easy to fly in any direction. They can also hover in place super smoothly. The engineering and design is different to an airplane or helicopter for flying.
In this post we look at how a quadcopter flies, the required motor direction, configuration, setup, propeller design along with quadcopter motor thrust and calculations required.
There are also some excellent videos and links to very interesting relevant articles for further reading on how a quadcopter flies.
How A Quadcopter Works
So how does a quadcopter hover or fly in any direction, lift or descend at a moments touch on the remote controller stick. Drones can also fly autonomously through programmed waypoint navigation software and fly in any direction going from point to point. So let’s look at the quadcopter technology, which makes this possible.
It is the propeller direction along with the drone’s motor rotation and speed, which make it’s flight and maneuverability possible.
The quadcopter’s flight controller sends information to the motors via their electronic speed control circuits (ESC) information on thrust, RPM, (Revolutions Per Minute) and direction. The flight controller will also combine IMU, Gyro and GPS data before signalling to the quadcopter motors on thrust and rotor speed.
While the drone and quadcopter technology of today is all modern, they still use the old principles of aircraft flight, gravity, action and reaction pairs.
In the manufacture of quadcopters, propellers and motor design, the 4 forces which affect all flight (weight, lift, thrust and drag) are also important considerations.
Mathematics is also used to calculate quadcopter motor thrust while aircraft aerodynamics is used for propeller design and the movement of air above, below and around the quadcopter.
Importance Of How A Quadcopter Works And Flies
With a small bit of experience, flying a quadcopter becomes automatic. You move the sticks on the Remote Controller Ground Station which send the quadcopter in whichever direction you want it to fly. We don’t need to think about what the motors or propellers are doing.
Now supposing your quadcopter wasn’t flying correctly. Maybe it is pulling in one direction or not hovering smoothly. Well, understanding how a quadcopter works and flies will help you locate the issue with a motor or propeller, especially if a visual inspection does not show a fault.
When you understand quadcopter propeller design and motor thrust, you can make changes to your quadcopter such as removing the camera and installing another payload such as a Time-of-Flight or a Lidar sensor.
Flying with a different payload will have an effect on the control, flight and balance of the drone. A different payload will then require different quadcopter motor thrust.
If you are building your own or designing quadcopters, then understanding motor and propeller design is essential information. You need the correct quadcopter motor configuration, matching propellers, electronic speed control circuits along with IMU and GPS together with matching the correct body.
If you want to understand more about all the other components which make up our normal drone, then read this terrific article on all types of drone technology.
Ok, let us now look at how a drone flies and specifically the quadcopter propeller and motor direction and design.
Quadcopter Motor And Propeller Direction Explained
How A Quadcopter Flies
Basically, the movement on the remote control sticks, sends signals to the central flight controller. This central flight controller sends this information to the Electronic Speed Controllers (ESCs) of each motor, which in turn directs its motors to increase or decrease speed.
Remote Control Stick Movement → Central Flight Controller → Electronic Speed Control Circuits (ESCs) → Motors and Propellers → Quadcopter Movement or Hover.
Central Flight Controller
Now the central flight controller also takes information from IMU, Gyroscope, GPS modules and obstacle detection sensors if on the quadcopter. It makes computation calculations using programmed flight parameters and algorithms, then sends this data to the electronic speed controllers.
In fact, most flight controllers encompass the IMU, GPS, Gyroscope and plenty more features to control the quadcopter flight and stability. Quite often, they have dual IMUs for redundancy and other safety features, such as Return-To-Home.
An example of a central flight controller would be the new DJI N3 Flight Controller. It has so loads of features and can work with a variety of motors.
Electronic Speed Control Circuits (ESCs)
 Each quadcopter motor has a circuit called an Electronic Speed Control (ESC). An electronic speed controller is an electronic circuit with the purpose to vary an electric motor’s speed, its direction and also braking.
Each quadcopter motor has a circuit called an Electronic Speed Control (ESC). An electronic speed controller is an electronic circuit with the purpose to vary an electric motor’s speed, its direction and also braking.
Electronic Speed Controllers are an essential component of modern quadcopters. They offer high power, high frequency, high resolution 3-phase AC power to the motors. At the same time these ESCs are really small and compact.
Quadcopters and drones depend entirely on the variable speed of the motors driving the propellers. This wide variation and RPM thrust and control in motor/ propeller speed gives the quadcopter all of the necessary control to fly.
To understand more on Electronic Speed Controllers, view this terrific video called “RC Basics – The ESC“.
Drone Propulsion System
The ESCs are one very important component of the drone propulsion system. ESCs need to have matching drone motors which in turn need to have compatible propellers. Here is the list of the components in a drone motor and propulsion system;
- Motor Stator
- Motor Bell (rotor)
- Windings
- Bearings
- Cooling System
- Electronic Speed Controllers
- ESC Updater
- Propellers
- Wiring
- Arm
Quadcopter Motor Propeller Direction
Vertical Lift – Quadcopter Motor Propeller Direction
In order for a quadcopter to rise into the air, a force must be created, which equals or exceeds the force of gravity. This is the basic idea behind aircraft lift, which comes down to controlling the upward and downward force.
Now, quadcopters use motor design and propeller direction for propulsion to basically control the force of gravity against the quadcopter.
The spinning of the quadcopter propeller blades push air down. All forces come in pairs (Newtons Third Law), which means for every action force there is an equal (in size) and opposite (in direction) reaction force. Therefore, as the rotor pushes down on the air, the air pushes up on the rotor. The faster the rotors spin, the greater the lift and vice-versa.
Now, a drone can do three things in the vertical plane: hover, climb, or descend.
Hover Still – To hover, the net thrust of the four rotors push the drone up and must be exactly equal to the gravitational force pulling it down.
Climb Ascend – By increasing the thrust (speed) of the four quadcopter rotors so that the upward force is greater than the weight and pull of gravity.
Quadcopter Propeller Direction – Yaw, Pitch, Roll
Before delving into the quadcopter motor and propeller setup, lets explain a bit about the terminology used when it is flying forwards, backwards, sideways or rotating while hovering. These are known as Pitch, Roll and Yaw.
Yaw – This is the rotating or swiveling of the head of the quadcopter either to right or left. It is the basic movement to spin the quadcopter. On most drones, it is the achieved by using the left throttle stick either to the left or right.
Pitch – This is the movement of quadcopter either forward and backward. Forward Pitch is achieved generally by pushing the throttle stick forward, which makes the quadcopter tilt and move forward, away from you. Backward pitch is achieved by moving the throttle stick backwards.
Roll – Most people get confused with Roll and Yaw. Roll is making the quadcopter fly sideways, either to left or right. Roll is controlled by the right throttle stick, making it fly either left of right.
Most of the higher tech drones such as the Yuneec Q500 4k quadcopter allow you to fly it in 2 different ways. You can fly the drone as if you are the pilot and actually in the quadcopter. You use the control sticks differently on the roll whether the drone is coming towards you or flying away from you.
Here is a short video, which shows you very simply what roll, pitch and yaw movements are.
Quadcopter Motor Direction For Yaw
Yaw is the deviation or rotating of the head of the quadcopter either to right or left. On a drone such as the DJI Mavic Pro or the latest Mavic 2 Pro, the Yaw action is controlled by the right control stick on the remote controller. Moving the stick either to the left or right will make the quadcopter swivel either left or right.
The movement on the remote control ground station sends signals to the flight controller which in turn sends data for the quadcopter ESC circuits which control the motor configuration and speed to the motors.
To see how this actually works, take a look at the below quadcopter propeller configuration diagram. The diagram is of a DJI Phantom 3 quadcopter, viewed from above with the rotors labeled 1 through 4.

In this above diagram, you can see the quadcopter motor configuration, with the 2 / 4 motors are rotating counterclockwise (CCW motors) and the 1 / 3 motors are rotating clockwise (CW motors). With the two sets of quadcopter motors configured to rotate in opposite directions, the total angular momentum is zero.
Angular momentum is the rotational equivalent of linear momentum and is calculated by multiplying the angular velocity by the moment of inertia. What is the moment of inertia? It is similar to the mass, except it deals with rotation. Angular momentum depends on how fast the rotors spin.
Conceptually, moment of inertia can be thought of as representing the object’s resistance to change in angular velocity.
If there is no torque on the quadcopter motors, then the total angular momentum must remain constant which is zero. To understand the angular movement of the above quadcopter, think of the 2 and 4 blue counterclockwise rotors having a positive angular momentum and the green clockwise quadcopter motors having a negative angular momentum. I’ll assign each motor a value of -4, +4, -4, +4, which equates to zero
To rotate the drone to the right, then a decrease in the angular velocity of motor 1 to have an angular momentum of -2 instead of -4. If nothing else happened, the total angular momentum of the quadcopter would now be +2. Now, that can’t happen. The drone will now rotate clockwise so that the body of the drone has an angular momentum of -2.
Decreasing the spin of rotor 1 did indeed cause the drone to rotate, but is also causes a problem. It also decreased the thrust from motor 1. Now the net upward force does not equal the gravitational force and the quadcopter descends.
Also the quadcopter motor thrust are not the same so the quadcopter becomes unbalanced. The quadcopter will tip downward in the direction of motor 1.
To rotate the drone without creating the above imbalances, then a decrease in the spin of motors 1 and 3 with an increase in the spin for rotors 2 and 4.
The angular momentum of the rotors still doesn’t add up to zero, so the drone body must rotate. However the total force remains equal to the gravitational force and the drone continues to hover. Since the lower thrust rotors are diagonally opposite from each other, the drone can still stay balanced.
Quadcopter Propeller Direction For Pitch And Roll
Because most quadcopters are symmetrical (DJI Phantom 4 Pro V2, Autel X-Star and Holy Stone HS 100 drone for example), there is no difference between moving forward or backward. It is also the same for side to side motion. How to fly forward also explains how to fly backwards or sideways.
In order to fly forward, an increase in the quadcopter motor rpm (rotation rate) of rotors 3 and 4 (rear motors) and decrease the rate of rotors 1 and 2 (front motors) is required. The total thrust force will remain equal to the weight, so the drone will stay at the same vertical level.
Also, since one of the rear rotors is spinning counterclockwise and the other clockwise, the increased rotation of those motors will still produce zero angular momentum. The same holds true for the front rotors, and so the drone does not rotate.
However, the greater force in the back of the drone means it will tilt forward. Now a slight increase in thrust for all rotors will produce a net thrust force which has a component to balance the weight along with a forward motion component.
How Do Quadcopter Work Videos
Here is an excellent video which explains very easily how a quadcopter works and flies.
This next video discusses quadcopter motor direction.
How Quadcopter Motors Work
Above, we discussed how the quadcopter motors and propellers work. Here is some extra information on quadcopter motors looking at the latest designs and innovation in motor technology along with the top brands.
Brushless Quadcopter Motors
Nearly all quadcopters released in the past few years and going forward are using brushless electric motors. Quadcopter brushless motors are more efficient, more reliable and quieter than a brushed motor. The type of motor and its design is very important. A more efficient motor means less battery drain and more flying time.
Stability is very important for a quadcopter so the top motors produce very little vibration on the motor meaning the flight controller has less work to do to keep the quadcopter steady.
Here are 2 excellent articles which explain all about brushless motors and how to choose a quadcopter motor.
Clockwise (CW) and Counter Clockwise (CCW) Motor Direction
A quadcopter must have 4 motors. To have a balanced quadcopter, the propeller rotation has to be toward the quadcopter main body. To achieve this you need the quadcopter motor setup as follows:
- Front Left – Clockwise motor (CW)
- Front Right – Counter Clockwise motor (CCW)
- Back Left – Counter Clockwise motor (CCW)
- Back Right – Clockwise motor (CW)
Note: Make sure that the placement of propellers on the motors are proper. You want to place a CCW propeller on a CCW motors etc.
Quadcopter Motor Brands
DJI Company – Motors, ESC And Propellers
 DJI are the largest consumer and professional multirotor manufacturer at present. They supply 70% of drones to the market. They also manufacture the excellent range of Zenmuse gimbals and cameras.
DJI are the largest consumer and professional multirotor manufacturer at present. They supply 70% of drones to the market. They also manufacture the excellent range of Zenmuse gimbals and cameras.
In recent years they have been producing top of the range quadcopter and multirotor motors for their own drones but also propulsion systems which anyone can buy and use to build their own UAV.
The latest multirotor motors from DJI are the E5000, E2000, Snail and E305.
All their latest motors or propulsion systems contain the quadcopter motor, props, electronic speed control circuits and cooling system. The DJI E5000 motor and most of their other motors are sealed to protect against rain.
We are now seeing quadcopters being used on farms for surveying the land, fences and buildings as well as crop monitoring. Multirotors can also be used to spray crops with the DJI MG-1S quadcopter specifically build for this purpose. When spraying crops it is essential to have a sealed motor.
T- Motor Company – Motors, ESC and Propellers
Also knows as Tiger Motor manufacture advanced propulsion systems for UAVs. They specialize in motors, ESCs and propellers. T-Motor produce quadcopter motors of the highest quality which are widely used for aerial photography, industrial, agricultural, and commercial applications.
Motors From T-Motor
T-Motor range of 32 motors are as follows;
- 4 U Power
- 4 U Efficiency type
- 4 P type motors
- 8 Navigation type
- 4 FPV type
- 4 Anti-gravity
- 4 Gimbal type
T-Motor Electronic Speed Controllers
T-Motor has 17 type of ESC circuits as follows;
- 4 Alpha Series
- 4 Flame Series
- 3 Air Series
- 4 FPV Series
- 2 T Series
They ESC circuits are really high spec. Let’s take a quick look at the features on the T-Motor Alpha 40A LV ESC.
The Alpha 40A LV is a low noise, temperature and interference ESC and is very fast to respond.
Field Oriented Control (FOC) Technology – The principle of FOC is to control the motor output via the adjustment of the current flow and angle which control the magnetic field and torque of the motor.
The T-Motor Alpha Series contains intelligent features and protections for the motor as follows;
- Short circuit protection
- Over-current protection
- Throttle loss protection
- Motor lock-up protection
- Low voltage protection
- Anti-corrosion
- Dust resistant and waterproof
- Nano coating
- Ultra-light shell
- Efficient Cooling
T-Motor Propellers
The T-Motor propeller range is vast, covering FPV, Ultra Light, Polished, Foldable in Plast and Carbon Fiber, in a variety of sizes.
Quadcopter Motor Thrust Calculators
Here is an article which shows you how to calculate the quadcopter motor thrust using mathematical formula.
There are also a number of quadcopter motor thrust calculators online. Here are the 3 most frequently used quadcopter thrust and lift calculators;
- eCalc Multicopter Thrust Calculater
- DriveCalc Quadcopter Lift Calculator
- GoBrushless Thrust Calculator
Quadcopter Propeller Design
Prop Size Explained
Quadcopter propellers come in a huge variety of materials, dimensions and prices from bottom to top of the range. Generally, cheaper props are less precisely manufactured and more prone to creating vibration.
This applies especially to the relatively larger end of the prop spectrum, with differences becoming less perceptible for smaller craft. If you are flying a quadcopter with the intention of producing top aerial photos or film, then it is worth spending money on top quality propellers. Also, use a quality Prop Balancer to check your quadcopter propellers every few flights.
There are three simple measurements to keep in mind when choosing propellers if you are designing or looking to improve your quadcopter.
Length – The first is length (Diameter), usually given in inches. The length of a propeller is the diameter of a disc the prop makes when it’s spinning
The higher the Kv rating of your motors, the smaller your props need to be. Smaller props allow for greater speeds, but reduced efficiency. A larger prop setup (with correspondingly low Kv motors) is easier to fly steadily. It also uses less current and lifts more weight.
The best way to gauge the right range for motors and props is referring to manufacturer recommendations if you’re building an quadcopter.
Prop Pitch – This second measurement is also very important. Prop dimensions are quoted in the form 21 x 7.0 inch (533 x 178 mm) which is the DJI E2000 propulsion system. The first number refers to the propeller length as above. The second is pitch, defined as the distance a prop would be pulled forward through a solid in a single full revolution. For example this propeller with a 7.0 inch pitch would move forward 7.0 inches in one revolution.
Bore – The last is known as bore measurement, which is simply the size of the hole in the center of the prop. This must be matched to the shaft of your chosen motors. Adapters are available to downsize a prop’s bore. Alternatively, some props, such as those produced by T-Motor, use a direct mounting system whereby screws secure the props directly to the motor head.
Self Locking – Most quadcopters today use Self Locking props. They call these “Self locking”, because on a quadcopter, 2 motors are spinning clockwise and the other 2 are spinning counter clockwise. By using propeller threads that are the opposite to motor spin direction, the props automatically lock themselves down and won’t come loose when flying.
Large Or Smaller Quadcopter Propellers
The greater the pitch, then the higher the thrust and necessary motor output. Typically, multi-rotors use props with pitches in the range of 3 to 5 inches. Lower pitches are more efficient. The larger the prop (either increasing diameter, or pitch or both), the more energy it takes to spin it. However, larger propeller or higher pitch length will increase your aircraft’s speed but also use more power.
Generally speaking, a prop with smaller diameter or pitch can spin faster (higher RPM), because the motor doesn’t need to work as hard to spin it so it pulls less current. They tend to run smoother and feels more responsive to the sticks. The faster change of RPM due to less inertia helps stability of the quadcopter.
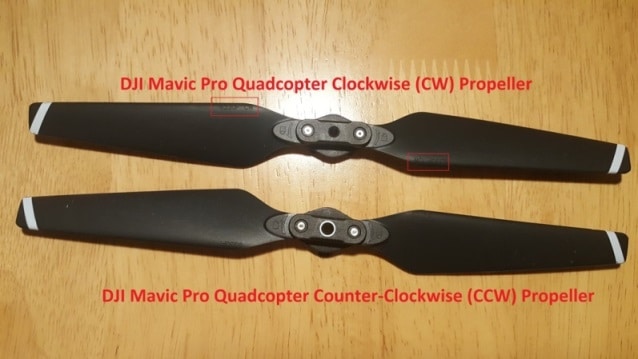
Clockwise (CW) And Counter-clockwise (CCW) Propellers
The quadcopter will come with 4 propellers with the clockwise and counter-clockwise propellers having different design. When you are buying or viewing propellers, you will read about CW which stands for clockwise and CCW which stands for counter-clockwise propellers.
Therefore matching CCW and CW propellers are required to generate thrust, as well as having opposing yaw motion that cancel each other out in flight. To read further on quadcopter propellers, here is an nice article entitled, “How To Choose Propellers For A Mini Quad“.
The below image is of the CW and CCW of the DJI Mavic Pro quadcopter props. Both are marked with “8330F” which is the default props with come with the Mavic Pro. However, on the CW propeller it is actually marked as “8330F CW”. So it is good to look closely at your props to find out whether they are CW or CCW.
Quadcopter Propeller Material
The quadcopter propeller material is generally plastic or the higher end with carbon fiber. However, you can also buy wood propellers which you generally see in the model aircraft sector.
How To Choose The Best Quadcopter Propeller
Next here is a terrific video which helps you decide on choosing the best propeller. There really is a lot to think about.